




In Effidence-Roboterlösungen sind unterschiedliche Technologien und Kompetenzen implementiert.
Einfache und effiziente installations- und konfigurationswerkzeuge
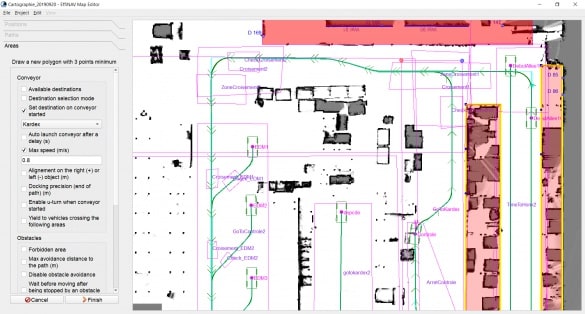
Die autonome Navigation von Roboterfahrzeugen erfordert die Installation und Konfiguration mit dem Tool MapEditor.
Der erste Schritt ist die Aufnahme einer LIDAR-Karte der Umgebung, indem das Fahrzeug im “Follow-me”-Modus betrieben wird. Dieses Kennfeld wird dann an das Werkzeug MapEditor übergeben, um die :
- die Elemente, die als Referenzpunkt für den Standort verwendet werden können. Sie können natürlich sein (Wände, Lagerregale, Pfosten usw.) oder gezielt hinzugefügt werden, wie z. B. ein Klebereflektor. Allerdings wird nur die menschliche Hand definieren, was als bitter zu betrachten ist,
- die verschiedenen möglichen Routen in der Evolutionszone,
- die spezifischen Verhaltensweisen des robotisierten Fahrzeugs nach definierten Zonen: Geschwindigkeitsbegrenzung, Hupen, Ausweichen, Be-/Entladen, etc…
Der EffiFCS-Konfigurator wird verwendet, um die logischen Regeln für die Verwaltung des Flottenkoordinierungssystems (EffiFCS) festzulegen. Sowohl das Verkehrsmanagement als auch die Interaktion mit externen Geräten (Ruftaste, Ampeln, Werkzeugmaschinen usw.) sind vollständig konfigurierbar.
Überwachung von leistungsindikatoren für roboterfahrzeuge
Alle Ereignisse, die der EffiNAV-Bordsoftware oder der EffiFCS-Koordinationssoftware bekannt sind, werden aufgezeichnet.
Entfernungen und Fahrtzeiten, An- und Abfahrten, bestimmte Verhaltensweisen usw. werden chrono-referenziert aufgezeichnet. Diese Daten werden dann über das Überwachungstool des Flottenkoordinationssystems zur Verfügung gestellt.
Die Rohdaten können heruntergeladen und in einer Tabellenkalkulation ausgewertet werden.
