




En las soluciones robóticas de Effidence se aplican diferentes tecnologías y conocimientos.
Herramientas de instalación y configuración simples y poderosas
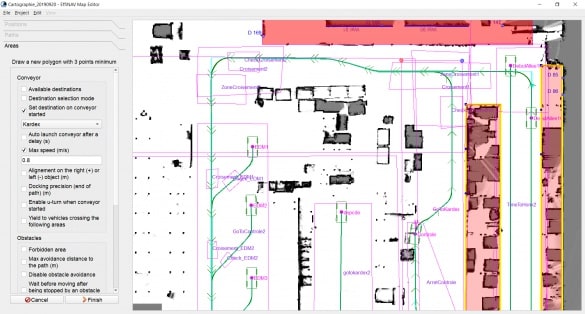
La navegación autónoma de los vehículos robóticos requiere la instalación y configuración con la herramienta MapEditor.
El primer paso es grabar un mapa LIDAR del entorno haciendo funcionar el robot en modo “Sígueme”. Este mapa es entonces transferido a la herramienta MapEditor para definir :
- los elementos que pueden ser utilizados como punto de referencia para la ubicación. Pueden ser naturales (paredes, estantes de almacenamiento, postes, etc.) o añadidos específicamente como un reflector adhesivo. Sin embargo, sólo la mano humana definirá lo que debe considerarse amargo,
- las diferentes rutas posibles en la zona de evolución,
- los comportamientos específicos de la solución robótica según las zonas definidas: límite de velocidad, bocina, ceder, carga/descarga, etc…
El Configurador EffiFCS se utiliza para establecer las reglas lógicas para la gestión del Sistema de Coordinación de la Flota (EffiFCS). La gestión del tráfico y la interacción con equipos externos (botón de llamada, semáforos, herramientas mecánicas, etc.) son totalmente configurables.
Supervisión de los indicadores de rendimiento de las soluciónes robóticas
Todos los eventos conocidos por el software de a bordo EffiNAV o por el software de coordinación EffiFCS son registrados.
Las distancias y tiempos de viaje, llegadas y salidas, comportamientos específicos, etc. se registran de forma crono-referenciada. Estos datos se ponen a disposición a través del instrumento de supervisión del Sistema de Coordinación de la Flota.
Los datos en bruto pueden descargarse y analizarse en una hoja de cálculo.
