




16
Nov
2023
Automatización de principio a fin: carga por inducción
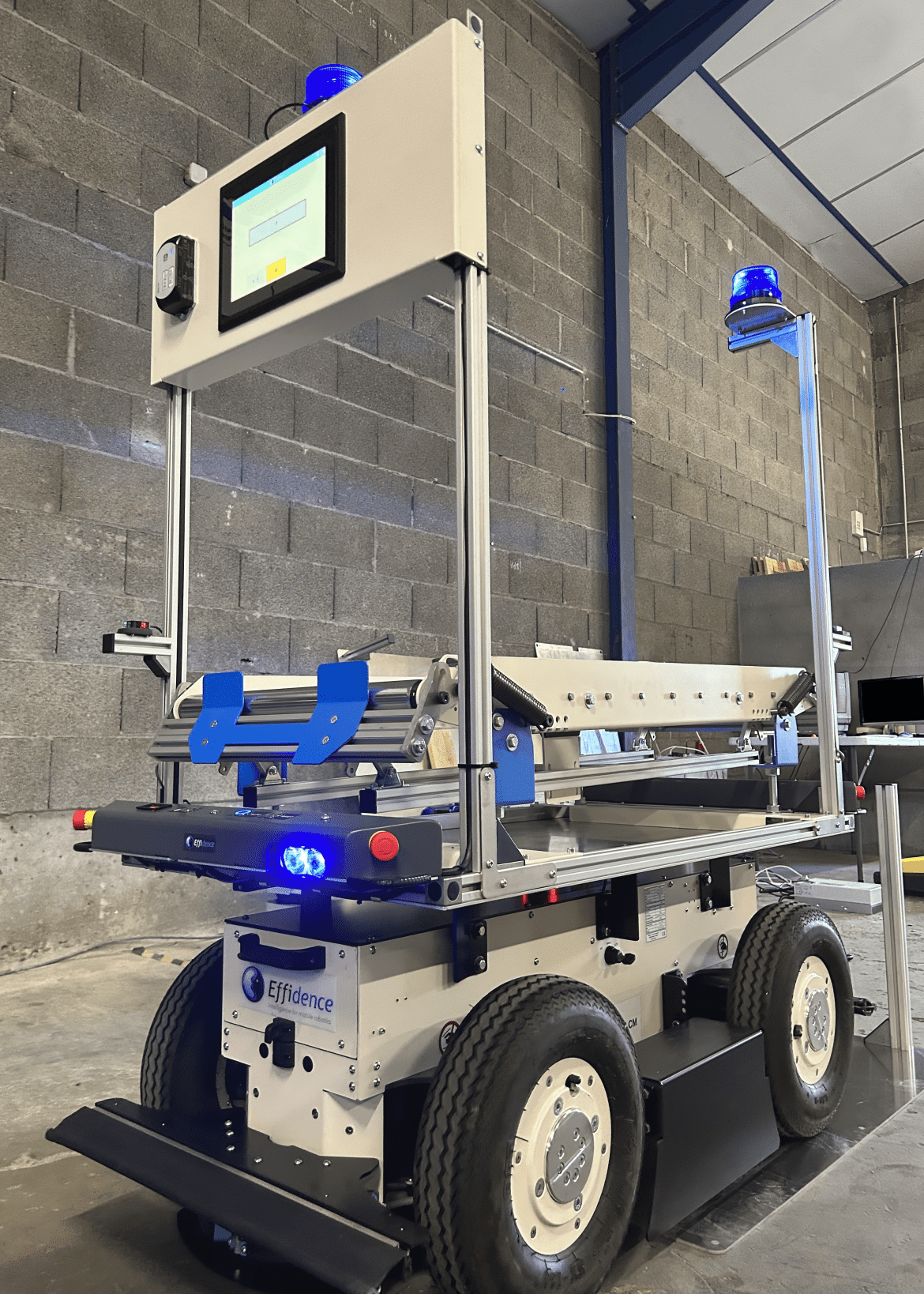
Aquí es un extracto del AMR EffiBOT, recargándose en su punto de carga por inducción tras una jornada de transporte o durante un momento de descanso.
Para esta aplicación, el robot está equipado con un módulo Convey-DROP para la transferencia de cargas sobre rodillos móviles de gravedad.
Personalizable y modular, también es posible modificar la estructura del robot para adaptarla a sus necesidades, así como añadir una pantalla táctil y pantallas iluminadas para mejorar la ergonomía.